
Human-mechatronics field Laboratories
Mechanical systems control laboratory
Staffs
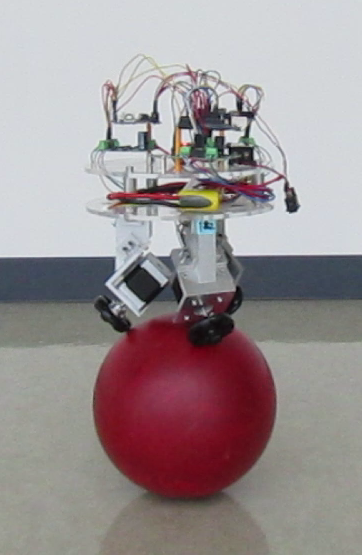
Fig. 1 Robot balancing on the ball
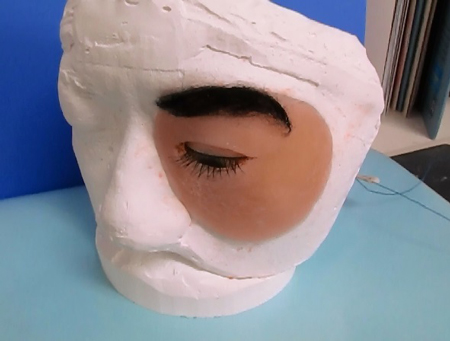
Fig. 2 Blinking epithese
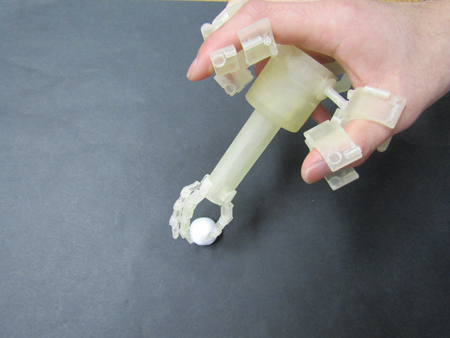
Fig. 3 Multi-finger hand
- Akihiro NAGANAWA (Professor, Dr. Eng.)
Research interests
Our scientific researches are focused on mechanical systems such as robotic and medical devices. In the robotic field, we study how to control a robot, which can balance on a ball. Our scientific interests are focused as well as on an ultrasonic motor which manufactures by using a piezoelectric element and a metallic plate. In medical engineering field, based on the needs of doctors, we develop a blinking epithese, having an application in Dentistry and Oral Surgery field and multi-finger hands which can serve the surgical procedures (Neurosurgery filed). We are also focused into design of such devices that can be used for endoscope procedures (Gastroenterology field).
Fig. 1 shows the state of the robot that balances on the ball. The final goal is to develop a robot, which can realize the 'Kanto of Akita City festival' (Kanto is a pole with lanterns looking like rice ears.) on the ball.
Fig. 2 illustrates an epithese, which is manufactured by the usage of electromagnetic actuator and silicon. The epithese can synchronously realize a blink like the healthy eye.
Fig. 3 shows a manipulator with three fingers, which is being developed in order to bend the fingers. Their purpose is to be used as medical instruments, when neurosurgery procedures are performed.
| Research themes |
|---|
|
Fluid power engineering
Staff

Fig.1 Remote operation of hydraulic cylinder using IP network.
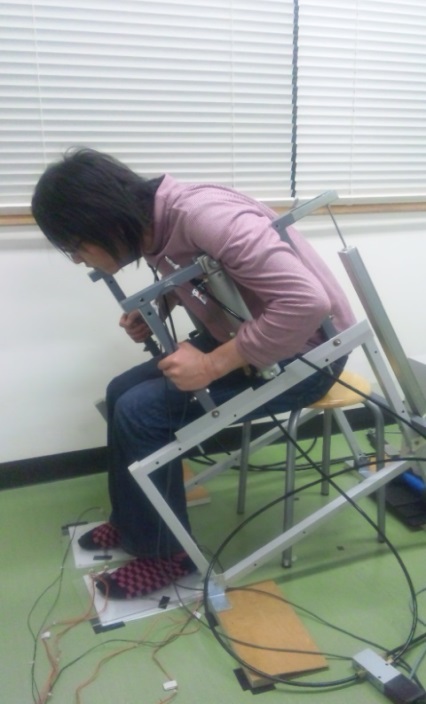
Fig.2 Support system for standing up and sitting motion using pneumatic cylinders
- Yoshihiro SASAKI (Associate Professor, Dr. Eng.)
Research interests
Hydraulic Control
Hydraulic systems have been widely used in industries due to the advantages of small size-to-power ratios and large force/torques output. Therefore, it is applied to restoration work at the disaster site and work in extreme situations such as space and underwater. In such a bad condition that human beings do not enter, working by remote control is effective. We propose to present the image transmission technology by the virtual space using the IP network and the generated force of the cylinder at the remote place as reaction force via the joystick to the operator.
Pneumatic Control
For elderly people whose muscle strength has declined, standing up and sitting motion in daily life are often burdens, and caregiver help may be necessary. In this study, we are developing a machine that realizes human-friendly stand-up support by applying the compressibility of air as a substitute for caregivers.
Figure 1 shows the operator remotely controls the hydraulic cylinder with a joystick while monitoring transmitted images from a distant place using the IP network.
Figure 2 shows a device that supports stable standing motion while changing the position and generated force of the pneumatic cylinder in real time using various sensors.
| Research themes |
|---|
|
Measurement/control system for medical engineering
Staff
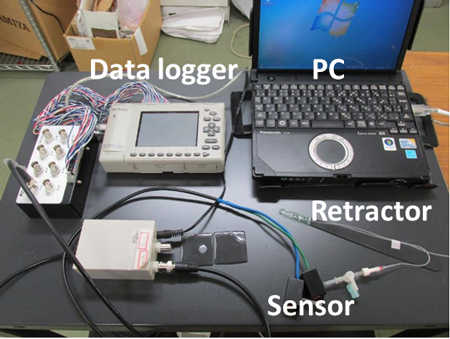
Fig. 1 Monitoring system for retraction pressure.

Fig. 2 Verification experiment for monitoring system using a porcine brain.
- Takeshi SEKI (Lecturer, Dr. Eng.)
Research interests
We developed measurement and control system for medical and industrial fields.
| Research themes |
|---|
|
