





ヒューマンメカトロニクス講座
長縄研究室
教授:長縄 明大
機械をコントロールする
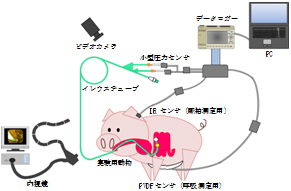
図1 小腸運動計測に関する動物実験の様子
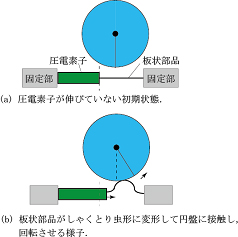
図2 しゃくとり虫変形を利用した超音波モータ
最近のほぼ全ての機械には、コンピュータが搭載されており、制御技術が必要不可欠になっています。本研究室では、コンピュータを使って機械をコントロールする研究や、生体情報のセンシング、および物体駆動アクチュエータの開発などを行っています。具体的には、秋田の竿灯をロボット化してコントロールする研究、ナノテクノロジーを支える基盤技術として精密位置決め装置の高精度制御、ヒトの消化管の運動状態を計測する医療機器開発、多機能化する小型機器の中でも使うことができる超音波モータの開発などです。
図1はバルーンカテーテルを用いた小腸運動計測に関する動物実験の様子です。本手法では、これまで計測できなかった運動波形を捉えており、ヒトの重要な臓器である小腸の運動を解明することが期待されています。
図2は本研究室で発明したモータの駆動原理です。(a)モータは、伸長する圧電素子と板状部品からなります。(b)圧電素子が伸長すると板状部品がしゃくとり虫型に変形して物体を駆動します。
| 専門分野 |
|---|
| 制御工学、医用工学、メカトロニクス |
| 研究テーマ |
|
巖見研究室
教授:巖見 武裕
福祉医療工学とバイオメカニクス

図1 リハビリ用車いす

図2 リハビリロボット
機能的電気刺激(以下FES)による運動機能の再建では、マイコンによって制御する多チャンネルの電気パルスで末梢神経、筋系を刺激し、これにより複数の筋を収縮させて麻痺肢の機能を再建します。本研究室では、ロボット工学の観点から生体をひとつの動作機構としてとらえ、FESによる運動再建に必要な研究と機器開発を大学病院と共同で行っています。また、実験的な手法を用いて実施する事が困難な課題に、コンピューター・シミュレーションの技法を用いて取り組んでいます。
図1は脊髄損傷で下肢が麻痺した患者が、機能的電気刺激により下肢筋を動かして自分の足で漕げるリハビリ用車いすです。
図2はセラピストによる上肢の運動療法をサポートするリハビリロボットです。
現在は、より小型化した卓上の上肢リハビリロボットを開発しています。
| 専門分野 |
|---|
| 医用生体工学、ロボット工学 |
| 研究テーマ |
|
佐々木研究室
准教授:佐々木 芳宏
油圧・空圧の長所を生かした流体制御技術の開発

図1 油圧シリンダの遠隔制御
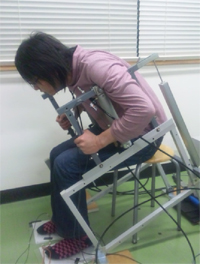
図2 立ち上がり支援装置
油圧制御
油圧システムは小型で高出力であるため、災害現場での復旧作業や宇宙、海中、大深度地下等の極限環境での作業に応用されています。このような、人間が立ち入れない悪環境化では、遠隔操作による作業が効果的です。本研究室では、IPネットワークを使った仮想空間による映像伝送技術や、操作者が操作するジョイスティックへの作業現場の力を反力として提示することで、操作の安定性向上や操作者への精神的負担の軽減についての研究を行っています。
空気圧制御
筋力の低下した高齢者には日常生活における立ち上がり、着座動作が負担になる場合が多く、介護者の手助けが必要になることがあります。本研究室では、介護者の代わりとなる空気の圧縮性を応用した人に優しい立ち上がり支援を実現する機械の開発を行っています。
図1は操作者は、IPネットワークを使い遠方からの伝送映像をモニタしながら、ジョイスティックで油圧シリンダを遠隔制御します。この時、ジョイスティックからは、油圧シリンダの発生力や外部負荷の状況を操作者に反力の強さとして提示されます。
図2は左右の空気圧シリンダで被験者の上肢を支え立ち上がりの支援を行います。被験者の立ち上がりのタイミングをセンサで検知することで、空気圧シリンダの位置、発生力をリアルタイムで可変させながら安定な立ち上がり支援を実現します。
| 専門分野 |
|---|
| 油空圧工学 |
| 研究テーマ |
|
関研究室
講師:関 健史
光と機械システムの融合
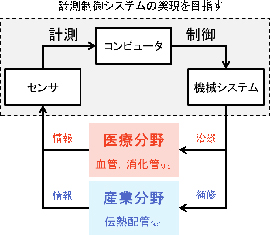
図1 光と機械システムの融合
生体内の血管や消化管、工場内の配管といった非常に狭い領域では、内視鏡などで映像を確認しながら治療や補修といった処置を実施します。適切な処置を行うためには様々な情報が必要になりますが、このような狭い場所にセンサなどを設置するスペースはほとんどありません。そのため、実際には作業者の経験や感覚で処置の判断や決定がされることが多く、限られたものしか処置ができないといった課題があります。
本研究室では、レーザー光や機械を用いる医療・産業分野に適用可能な計測制御システムに関する研究開発を行い、作業者の技術にかかわらず、適切な処置が自動制御によって実行できる手法の確立を目指しています。
図1はこれまで作業者は視覚や触覚などから情報を取得し、作業者本人の判断・決定によって機械システムの制御・操作を行っている。本研究では、これまで作業者が行っていた処置を図1の点線枠部分に示すような計測制御システムで実現するための計測手法や制御手法の検討を行っています。
| 専門分野 |
|---|
| 制御工学、医療工学 |
| 研究テーマ |
|
